The Lennard-Jones Potential¶
A pair of neutral atoms or molecules is subject to two distinct forces in the limit of large separation and small separation: an attractive force at long ranges (van der Waals force, or dispersion force) and a repulsive force at short ranges (the result of overlapping electron orbitals, referred to as Pauli repulsion from the Pauli exclusion principle). The Lennard-Jones potential (also referred to as the L-J potential, 6-12 potential or, less commonly, 12-6 potential) is a simple mathematical model that represents this behavior. It was proposed in 1924 by John Lennard-Jones. The L-J potential is of the form
\begin{equation} V(r) = 4\epsilon \left[ \left( \dfrac{\sigma}{r} \right)^{12} - \left( \dfrac{\sigma}{r} \right)^{6} \right] \end{equation}where $\epsilon$ is the depth of the potential well and $\sigma$ is the (finite) distance at which the inter-particle potential is zero and $r$ is the distance between the particles. The $\left(\frac{1}{r}\right)^{12}$ term describes repulsion and the $(\frac{1}{r})^{6}$ term describes attraction. The Lennard-Jones potential is an approximation. The form of the repulsion term has no theoretical justification; the repulsion force should depend exponentially on the distance, but the repulsion term of the L-J formula is more convenient due to the ease and efficiency of computing $r^{12}$ as the square of $r^6$.
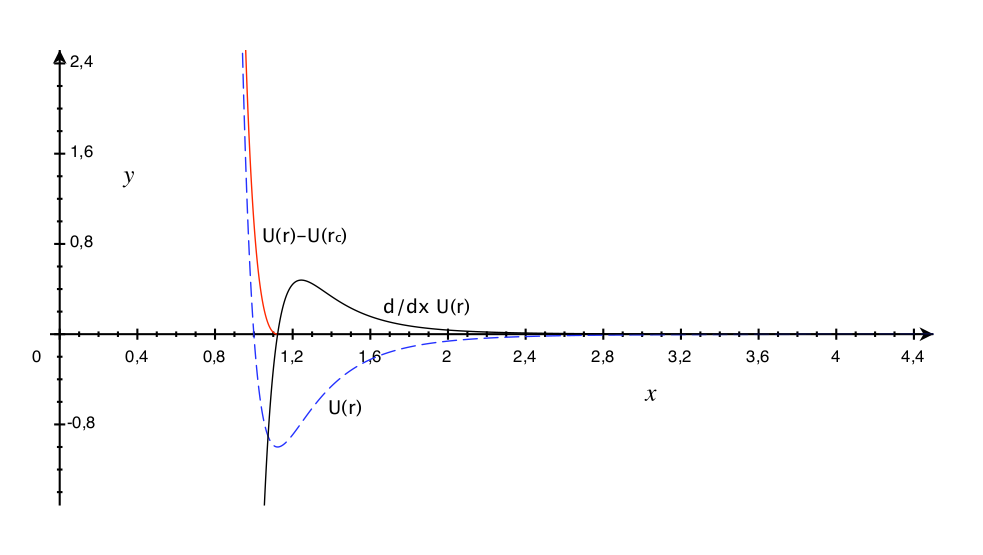
In practice, the L-J potential is cutoff beyond a specified distance $r_{c}$ and the potential at the cutoff distance is zero.